



गोदाम में विभिन्न प्रकार की भंडारण अलमारियाँ हैं, और भंडारण और पुनर्प्राप्ति विधियों को मुख्य रूप से निम्नलिखित श्रेणियों में विभाजित किया गया है, जिनमें मैनुअल भंडारण और पुनर्प्राप्ति, फोर्कलिफ्ट भंडारण और पुनर्प्राप्ति, और स्वचालित भंडारण और पुनर्प्राप्ति शामिल हैं। आजकल, कई उद्यम स्वचालित गोदाम संचालन का एहसास करना चाहते हैं, इसलिए वे स्वचालित गोदाम अलमारियों का उपयोग करना चाहते हैं। उदाहरण के लिए, फोर-वे कार रैक एक प्रकार का स्वचालित भंडारण रैक है। चार-तरफ़ा शटल एजीवी गोदाम में कैसे प्रवेश करती है और बाहर निकलती है? गोदाम भारी शेल्फ उत्पादन संयंत्र हैग्रिस का विश्लेषण किया गया।

चार तरफ़ा शटल गोदाम
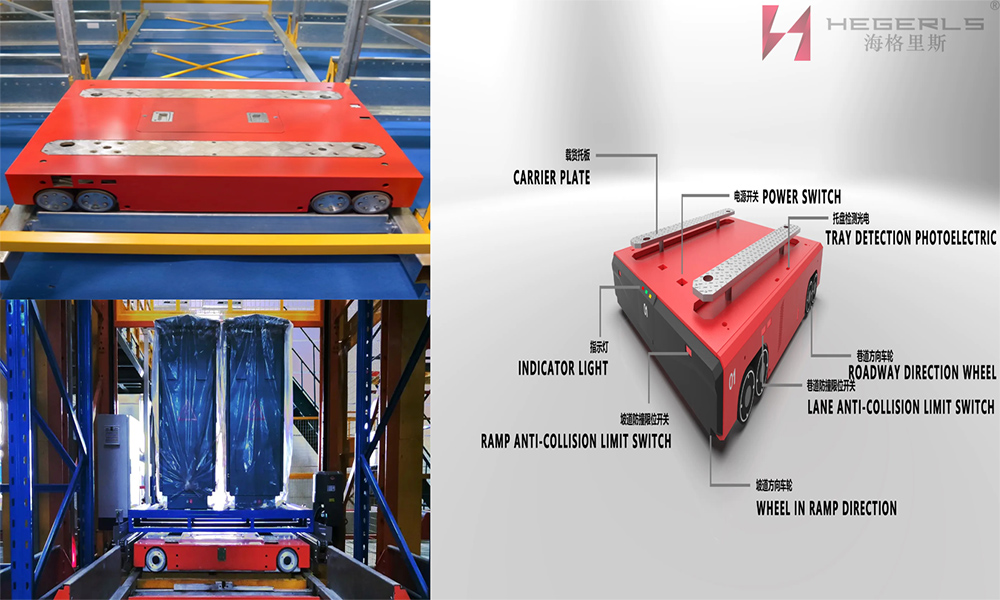
चार-तरफा शटल कार 12 पहियों से सुसज्जित है, जो ट्रैक विमान के साथ चार दिशाओं में यात्रा कर सकती है और गोदाम विमान पर किसी भी कार्गो स्थान तक स्वतंत्र रूप से पहुंच सकती है। चार-तरफा शटल को एक ही समय में दोनों तरफ के पहियों द्वारा संचालित किया जाता है ताकि यह सुनिश्चित किया जा सके कि ऑपरेशन के दौरान कार का शरीर विक्षेपित न हो, और यह त्रि-आयामी शेल्फ पर अनुदैर्ध्य और अनुप्रस्थ रेल के साथ वैकल्पिक रूप से चल सके।

साथ ही, फोर-वे शटल एक बुद्धिमान हैंडलिंग डिवाइस है जो न केवल अनुदैर्ध्य बल्कि पार्श्व रूप से भी चल सकता है। चार-तरफ़ा शटल में उच्च लचीलापन है, यह इच्छानुसार कार्यशील सड़क को बदल सकता है, और शटल कारों की संख्या को बढ़ाकर या घटाकर सिस्टम की क्षमता को समायोजित कर सकता है। यदि आवश्यक हो, तो कार्यशील वाहन टीम के शेड्यूलिंग मोड को स्थापित करके, प्रवेश और निकास संचालन की बाधाओं को हल करके सिस्टम के चरम मूल्य का जवाब दिया जा सकता है, और एक दूसरे के साथ प्रतिस्थापित भी किया जा सकता है, जब एक शटल या लिफ्ट विफल हो जाती है, अन्य सिस्टम क्षमता को प्रभावित किए बिना ऑपरेशन पूरा करना जारी रखने के लिए शटल या लिफ्ट को डिस्पैचिंग सिस्टम के माध्यम से भेजा जा सकता है। यह उपकरण कम प्रवाह और उच्च-घनत्व भंडारण, साथ ही उच्च-प्रवाह और उच्च-घनत्व भंडारण दोनों के लिए उपयुक्त है। यह अधिक दक्षता, लागत और संसाधन प्राप्त कर सकता है।
चार-तरफ़ा शटल एजीवी गोदाम में कैसे प्रवेश करती है और बाहर निकलती है?

1) भण्डारण विधि
a) इंटेलिजेंट फोर-वे शटल के तकनीशियन सबसे पहले इंटेलिजेंट फोर-वे शटल को चालू करते हैं और इसे तैयार करते हैं। बुद्धिमान चार-तरफा शटल स्टैंडबाय पर है;
बी) इंटेलिजेंट फोर-वे शटल के चयन स्थान की पुष्टि करने के बाद, डब्ल्यूसीएस इंटेलिजेंट फोर-वे शटल के वर्तमान स्थान और गंतव्य स्थान के अनुसार ड्राइविंग मार्ग की योजना बनाएगा, और फिर कर्मचारी इंटेलिजेंट फोर-वे को सामान वितरित करेंगे। डब्ल्यूसीएस के माध्यम से शटल;
ग) बुद्धिमान चार-तरफा शटल प्राप्त कार्य आदेश के अनुसार वितरण कार्य को पूरा करना शुरू कर देता है;
घ) क्रॉसिंग ट्रैक पर, बुद्धिमान चार-तरफा शटल वास्तविक दूरी के माध्यम से विस्थापन मोड में यात्रा करता है। ड्राइविंग प्रक्रिया के दौरान, यह लगातार उन पटरियों को स्कैन करता है जिनसे वाहन के शरीर का निचला हिस्सा गुजरता है। यह जिस भी क्रॉसिंग स्थिति से गुजरता है, वह पटरियों को स्कैन करके उसके द्वारा तय की गई दूरी का आकलन और अंशांकन करता है। जब यह गंतव्य के करीब होता है, तो यह पार्किंग स्थिति की सटीक स्थिति प्राप्त करने के लिए पार्श्व लेजर सेंसर के माध्यम से पार्किंग स्थिति को ठीक करता है;
ई) उप चैनल में, बुद्धिमान चार-तरफा शटल क्रॉस ट्रैक और साइड कैलिब्रेशन मिरर रिफ्लेक्टर को स्कैन कर सकता है, बिंदु स्थिति को स्कैन करके ड्राइविंग दूरी का आकलन और जांच कर सकता है, और गंतव्य तक पहुंचने के लिए उप चैनल में सटीक स्थिति नियंत्रण प्राप्त कर सकता है;
च) जब इंटेलिजेंट फोर-वे शटल चयनित पिकिंग पोजीशन पर आता है, तो पैलेट गिर जाता है, सामान शेल्फ पर रख दिया जाता है, और डब्ल्यूसीएस सिस्टम को डिलीवरी कार्य पूरा होने की सूचना दी जाती है;
छ) बुद्धिमान चार-तरफ़ा शटल कार्य निर्देश प्राप्त करना जारी रखता है या स्टैंडबाय क्षेत्र में लौट आता है।
2) वितरण विधि
a) इंटेलिजेंट फोर-वे शटल के तकनीशियन सबसे पहले इंटेलिजेंट फोर-वे शटल को चालू करते हैं और इसे तैयार करते हैं। बुद्धिमान चार-तरफा शटल स्टैंडबाय पर है;
बी) इंटेलिजेंट फोर-वे शटल के चयन स्थान की पुष्टि करने के बाद, डब्ल्यूसीएस इंटेलिजेंट फोर-वे शटल के वर्तमान स्थान और गंतव्य स्थान के अनुसार ड्राइविंग मार्ग की योजना बनाएगा, और फिर कर्मचारी चयन कार्य को इंटेलिजेंट फोर को भेजेंगे। -डब्ल्यूसीएस के माध्यम से रास्ता शटल;
ग) बुद्धिमान चार-तरफा शटल प्राप्त कार्य आदेश के अनुसार सामान उठाना शुरू कर देता है;
घ) क्रॉसिंग ट्रैक पर, बुद्धिमान चार-तरफा शटल वास्तविक दूरी के माध्यम से विस्थापन मोड में यात्रा करता है। ड्राइविंग प्रक्रिया के दौरान, यह लगातार उन पटरियों को स्कैन करता है जिनसे वाहन के शरीर का निचला हिस्सा गुजरता है। यह जिस भी क्रॉसिंग स्थिति से गुजरता है, वह पटरियों को स्कैन करके उसके द्वारा तय की गई दूरी का आकलन और जांच करता है। गंतव्य के करीब पहुंचने पर, यह सटीक स्थिति नियंत्रण और पार्किंग प्राप्त करने के लिए पार्श्व लेजर सेंसर के माध्यम से पार्किंग स्थिति को ठीक करता है;
ई) उप चैनल में, बुद्धिमान चार-तरफा शटल कार क्रॉस ट्रैक और साइड कैलिब्रेशन मिरर रिफ्लेक्टर को स्कैन करती है, इन बिंदुओं को स्कैन करके ड्राइविंग दूरी को जज और कैलिब्रेट करती है, और गंतव्य तक पहुंचने के लिए उप चैनल में सटीक स्थिति के नियंत्रण का एहसास करती है। .
पोस्ट करने का समय: सितंबर-19-2022